计算机科学SCI期刊推荐:IEEE Transactions on Robotics
机器人学顶尖期刊,IF值6+,扩刊状态!
本期小佩为大家带来的是,IEEE Transactions on Robotics(T-RO)出版关于机器人各方面的基本论文,其中包括计算机科学、控制系统、电气工程、数学、机械工程和其他领域的跨学科方法。
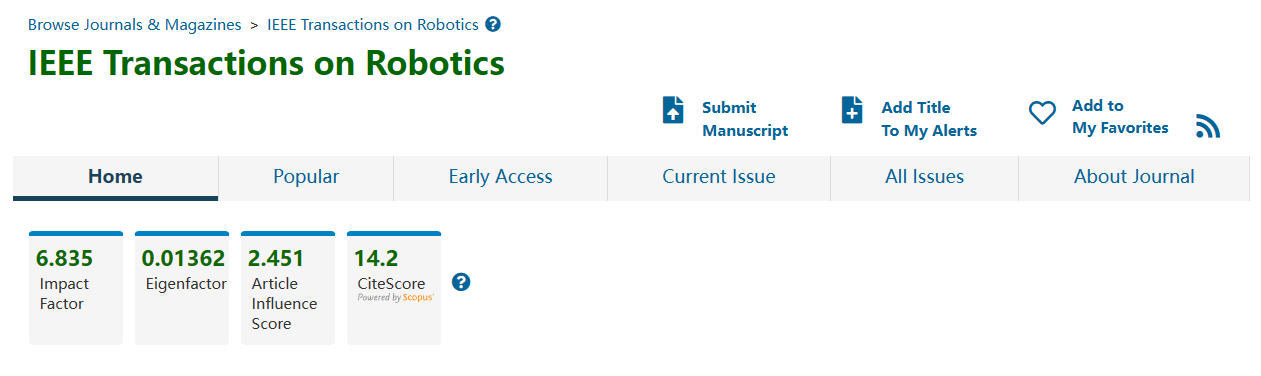
期刊ISSN:1552-3098
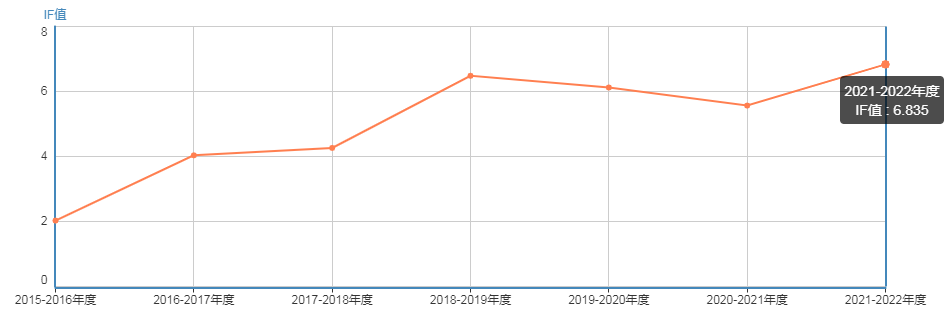
01 影响因子
该期刊影响因子在连续两年降低之后开始上升,其中2020-2021年度IF值为5.567,2021-2022年度IF值为6.835。
02 分区
WOS期刊SCI分区(2021-2022年最新版)位于1区。

中科院SCI期刊分区(2022年12月最新升级版)大类学科计算机科学、小类学科机器人学均位于1区。

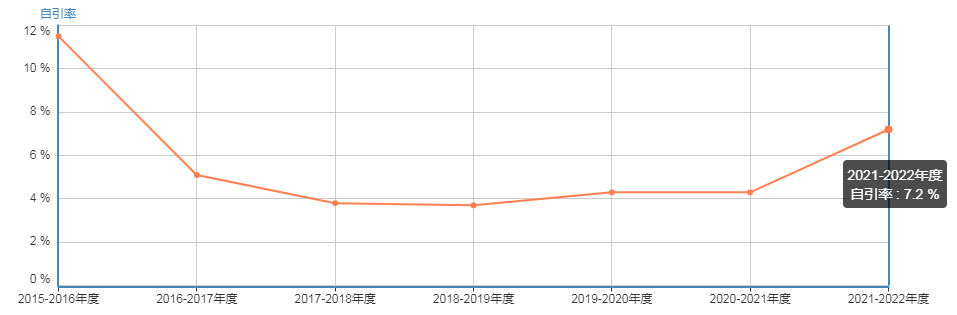
03 自引率
该期刊自引率过去几年较为稳定,近一年开始有所增长,其中2020-2021年度自引率为4.3%,2021-2022年度自引率为7.2%。
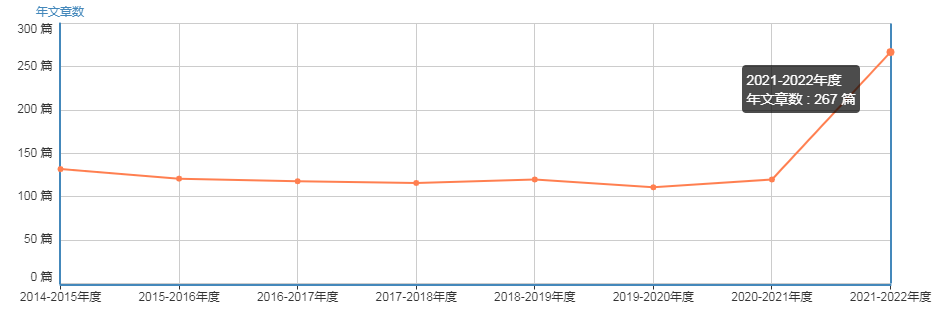
04 年发文量
期刊发文量过去几年是较为稳定的,近一年开始大幅度扩刊,其中2020-2021年度发文120篇,2021-2022年度发文267篇。
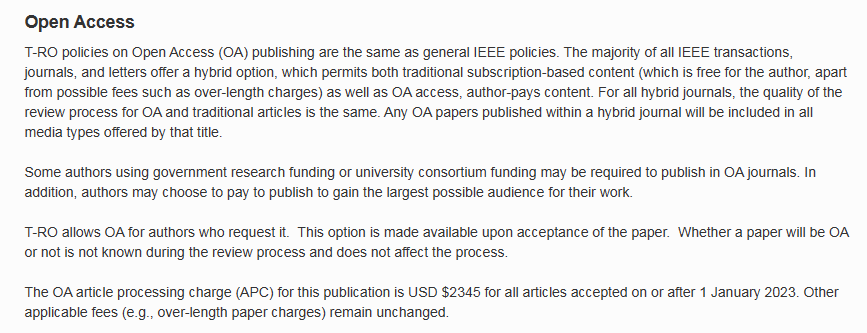
05 费用
根据官网显示:
对于2023年1月1日或之后接受的所有文章,本出版物的OA文章处理费(APC)为2345美元,其他适用费用(例如超长纸张费用)保持不变。
06 审稿周期
根据官网显示:
平均审稿速度约6.0个月(非官方)
07 文章主要研究领域及方向
IEEE Transactions on Robotics(T-RO)出版了关于机器人各方面的基本论文,其中包括计算机科学、控制系统、电气工程、数学、机械工程和其他领域的跨学科方法。机器人和智能机器和系统在以下领域至关重要:工业应用;服务和个人助理;外科手术;空间、水下和远程探索;娱乐;安全、搜索和救援;军事应用;农业应用;以及智能车辆。特别强调的是用于非结构化环境的智能机器和系统,其中相当一部分环境是未知的,无法直接感知或控制。
属于T-RO范围内的课题实例包括:
1 设计:机制和驱动;具有柔性元件的机器人;肢体结构;平行和混合机制;机器人手;蛇形和连续机器人;软机器人;模块化机器人;仿生和生物启发机器人;轮式机器人;水下机器人;飞行机器人;微型/纳米机器人;性能评估和优化;建模、识别、校准
2 传感和感知:传感和估计的基础;力和触觉传感;射程、声纳和惯性传感;GPS和里程测量;三维视觉;物体识别;视觉伺服;多传感器数据融合
3 操纵、界面和编程:操纵任务的运动和力的规划和控制;接触建模和操纵;抓取;合作操纵;移动性和操纵;触觉;感知的主动操纵;远程机器人;网络机器人;机器人系统结构和编程
4 在环境中移动:世界建模;同步定位和绘图(SLAM);运动规划和避障;腿部机器人、轮式移动机器人、粗糙地形上的机器人、水下机器人、空中机器人和多个移动机器人系统的建模和控制
5 工作中的机器人:工业机器人;空间机器人;农业和林业机器人;建筑业机器人;危险应用机器人;采矿业机器人;搜索和救援机器人;机器人监视和安全;智能车辆;医疗机器人和计算机集成手术;康复和保健机器人;家用机器人
6 机器人和人类:人形机器人;人类与机器人的物理和认知互动;人类与机器人的增强;社会和社会辅助机器人;向人类学习;基于行为的系统;机器人的AI推理方法;生物启发的机器人;进化机器人;神经机器人;感知机器人;机器人伦理学。
鼓励描述当前(工业和其他领域)具体应用的论文,只要论文能令人信服地证明它代表了当前的最佳实践,包括详细的特征和性能,并且具有普遍意义。
08 投稿须知
Regular and evolved paper在Transactions格式中最多可有20页。对于被接受的Regular and evolved paper的最终版本,超过12页的每一页都要收取强制性的版面费,最多不超过20页。(详情可查阅期刊官网作者须知:https://www.ieee-ras.org/publications/t-ro/information-for-authors#types)
09 经验分享
网友1
研究方向:工程技术机器人学
投稿结果:已投被拒
投稿周期:3.0个月
发表时间:2020-04-14 14:16:57
投稿经验:
要求研究方向,理论的新颖性和深度,实验的完整性,还有实际应用实验
网友2
研究方向:工程技术机器人学
投稿结果:已投修改后录用
投稿周期:3.0个月
发表时间:2022-07-09 21:32:10
投稿经验:
一审四个月给了大修,遇到疫情封校,修改的太慢了。二审两个月直接录用。tro降为二区非top还是太无语了
网友3
研究方向:工程技术工程:机械
投稿结果:已投结果未知
发表时间:2022-05-26 09:18:47
投稿经验:
神级期刊tro的性价比在降低,但中的难度依然极大。
网友4
研究方向:工程技术机器人学
投稿结果:已投结果未知
发表时间:2021-10-21 19:21:09
投稿经验:
投稿三个月给审稿结果。因为做的是机器人定位导航方向,审稿意见非常专业,且很有建设性。三个审稿人总共27条意见。回复审稿意见一共29页。感觉审稿意见对提升稿件质量很有帮助。
网友5
研究方向:工程技术机器人学
投稿结果:已投直接录用
投稿周期:6.0个月
发表时间:2020-02-08 02:06:23
投稿经验:
一审4个月,直接conditionally accept,二审2个月,accept。相比于其他某高影响因子trans水到了matlab仿真画个图就中的,该期刊一定要有优良实验,而且需要提供实际demo。这才是顶级期刊该有的风范。
10 期刊信息
期刊官方网址:http://ieeexplore.ieee.org/xpl/RecentIssue.jsp?punumber=8860
期刊投稿网址:https://ras.papercept.net/journals/tro/scripts/login.pl
11 期刊总结
IEEE Transactions on Robotics是中科院1区TOP期刊,其最新影响因子6.835,自引率在安全范围内,该期刊行业认可度较高,投稿存在一定难度,根据已投网友经验分析,该刊审稿速度适中,相关领域小伙伴可以关注一下。
 相关文章推荐
相关文章推荐
